




定位控制性能优良
覆盖误差、线性度、回差、死区、响应速度、稳定性、超调和调节时间等关键指标;统一测试平台下对标山武 AVP 系列,测试结果表现等效。
Product
IVP 系列接收控制系统输入信号,并根据阀位反馈进行闭环控制,调节气动执行机构输出,使调节阀开度与输入信号相对应。产品适用于直行程或角行程调节阀,可用于单作用执行机构;双作用工况可配套双作用放大器。
Features
樟数 IVP 系列智能阀门定位器接收来自 DCS / PLC 控制系统的 4-20 mA DC 阀位指令信号,与自身阀位反馈测量信号进行比较,通过闭环控制算法驱动力矩马达喷嘴挡板,调节气动执行机构输出气压,使调节阀快速准确达到目标开度。国内外的智能阀门定位器的关键核心技术包括:
覆盖误差、线性度、回差、死区、响应速度、稳定性、超调和调节时间等关键指标;统一测试平台下对标山武 AVP 系列,测试结果表现等效。
已在多个控制阀厂家装配现场覆盖测试 120 多台不同结构、型号和规格的控制阀,自整定可识别特征参数并匹配控制参数。
采用力矩马达喷嘴挡板原理实现 IP 电气转换,核心部件自主研制;相比依赖进口压电阀的路线,对气源环境具备更好的适应性。
具备 LCD 显示、按键菜单、HART 通讯、阀位输出、自整定、手动 / 自动切换、故障报警等主流实用功能。
自整定一键完成,默认无需组态;正反作用、气开 / 气关等由系统自动确定,安装时不要求 50% 阀位反馈杆水平。
具备 IP 力矩马达、气动放大器、阀位电位器和电路板测试工装;EMC 关键测试通过,振动、高低温、湿热和防爆认证按项目进度推进。
Models
IVPi 本安型:输入回路和反馈回路应通过认证且参数匹配的安全栅接入。
型号表示IVP(i/d)-L/R-N/H-N/F-N12/M20
示例:IVPi-L-H-F-M20



Specifications
| 输入信号 | 4–20 mA DC,可用于分程控制设定 |
|---|---|
| 最小工作电流 | 3 mA |
| 输入阻抗 | 非 HART 型:370 Ω 等效 / 20 mA DC HART 型:620 Ω 等效 / 20 mA DC |
| 阀位反馈 | 选配 4–20 mA DC 输出,典型 24 VDC 供电 |
| 反馈负载 | 最高 36 VDC,最大负载 800 Ω |
| 通讯方式 | HART 可选,协议版本 HART 7 |
| 适用阀型 | 直行程 / 角行程调节阀 |
|---|---|
| 执行机构 | 气动单作用 / 双作用;双作用需选购双作用放大器 |
| 供气压力 | 140–700 kPa |
| 空气消耗量 | 单作用 140 kPa 时 ≤5 NL/min;280 kPa 时 ≤6 NL/min;500 kPa 时 ≤7 NL/min |
| 最大输出流量 | 单作用 140 kPa 时最大 110 NL/min |
| 气源介质 | 清洁、干燥、无油仪表空气 |
| 环境温度 | IVPi:-40–+60 °C;IVPd:-40–+75 °C |
|---|---|
| 环境湿度 | 10–90%RH |
| 防护等级 | IP66 / NEMA Type 4X |
| EMC 抗扰度 | 浪涌:线-线 ±1.0 kV、线-地 ±2.0 kV 电快速瞬变脉冲群:±1.0 kV 静电放电:接触 ±4 kV、空气 ±8 kV |
| 振动条件 | 2 g,5–400 Hz |
| 防爆型式 | IVPi 本安型参考 Ex ia;IVPd 隔爆型参考 Ex db |
|---|---|
| 本安参数 | 输入回路参考 Ui=30 V,Ii=100 mA,Pi=1 W |
| 显示操作 | LCD 显示,本机按键操作 |
| 调试维护 | 自动设定、零点/满量程、动作方向、故障代码和状态读取 |
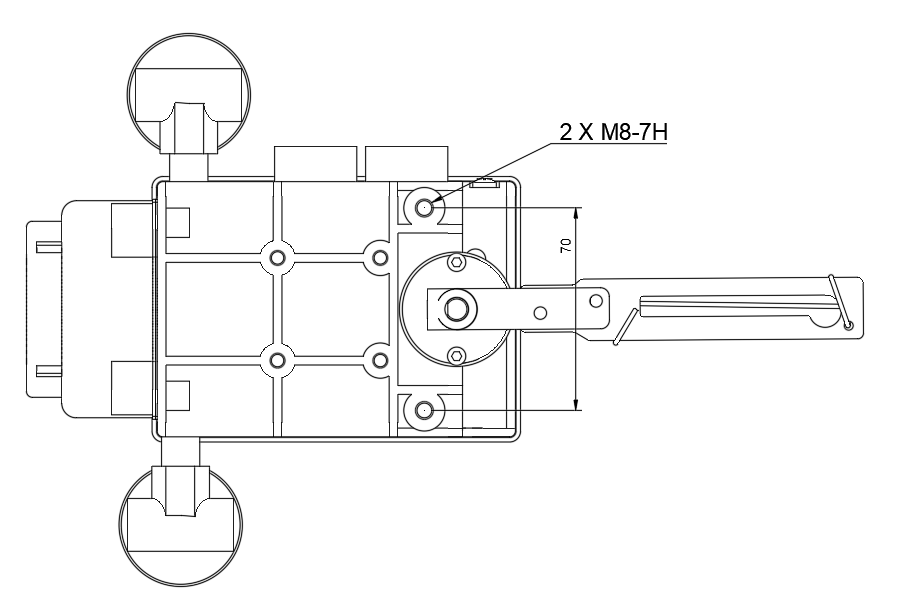
| 连接接口 | 电气 1/2 NPT 或 M20×1.5;气路固定 1/4 NPT |
Installation

核对产品型号、防爆型式、执行机构类型、行程范围、安装附件、现场环境、气源、电气回路和安装空间。
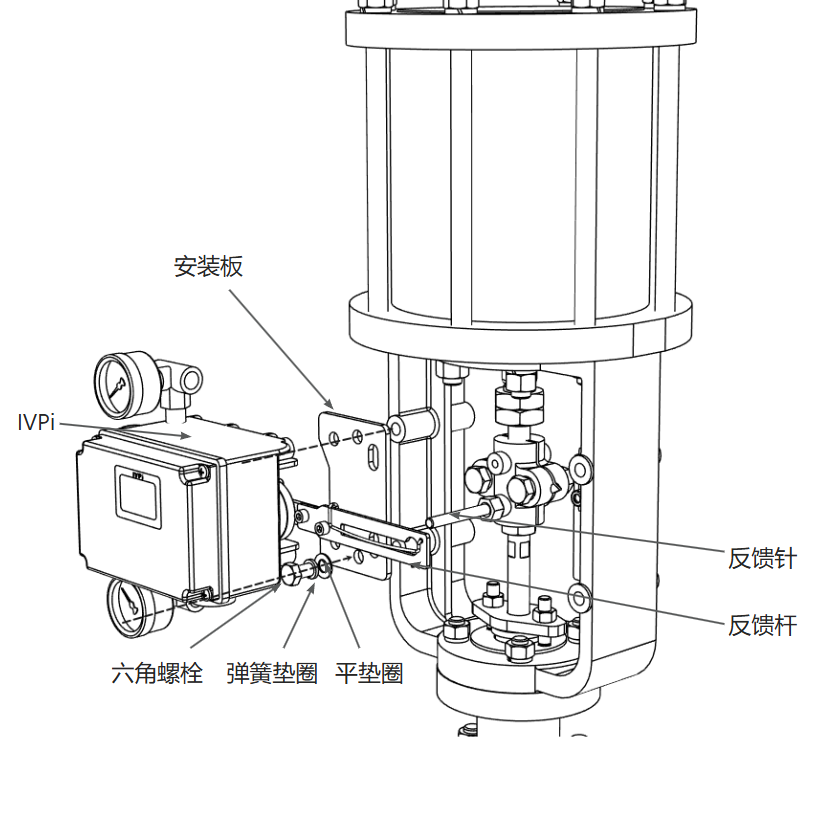
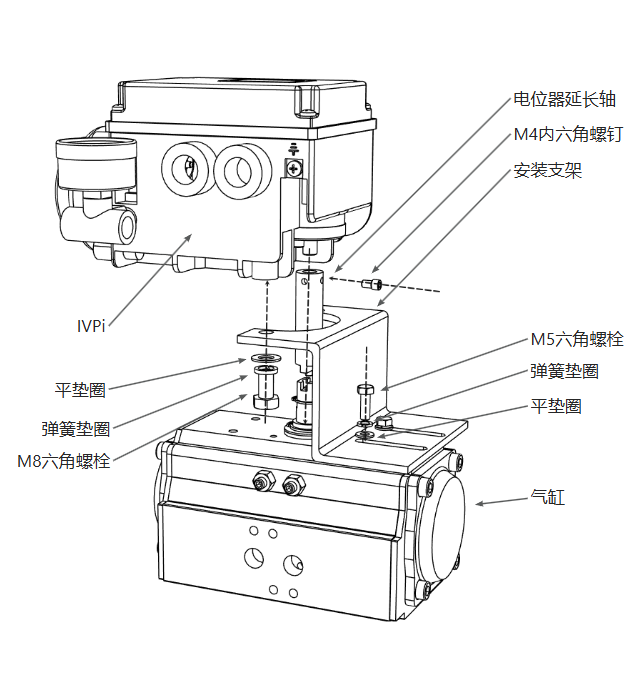
直行程反馈杆摆角须在限位螺钉范围内(约 ±50°)并留有余量,角行程反馈轴旋转无角度限制。两类安装均需检查全行程动作平稳、无卡阻、无机械干涉。
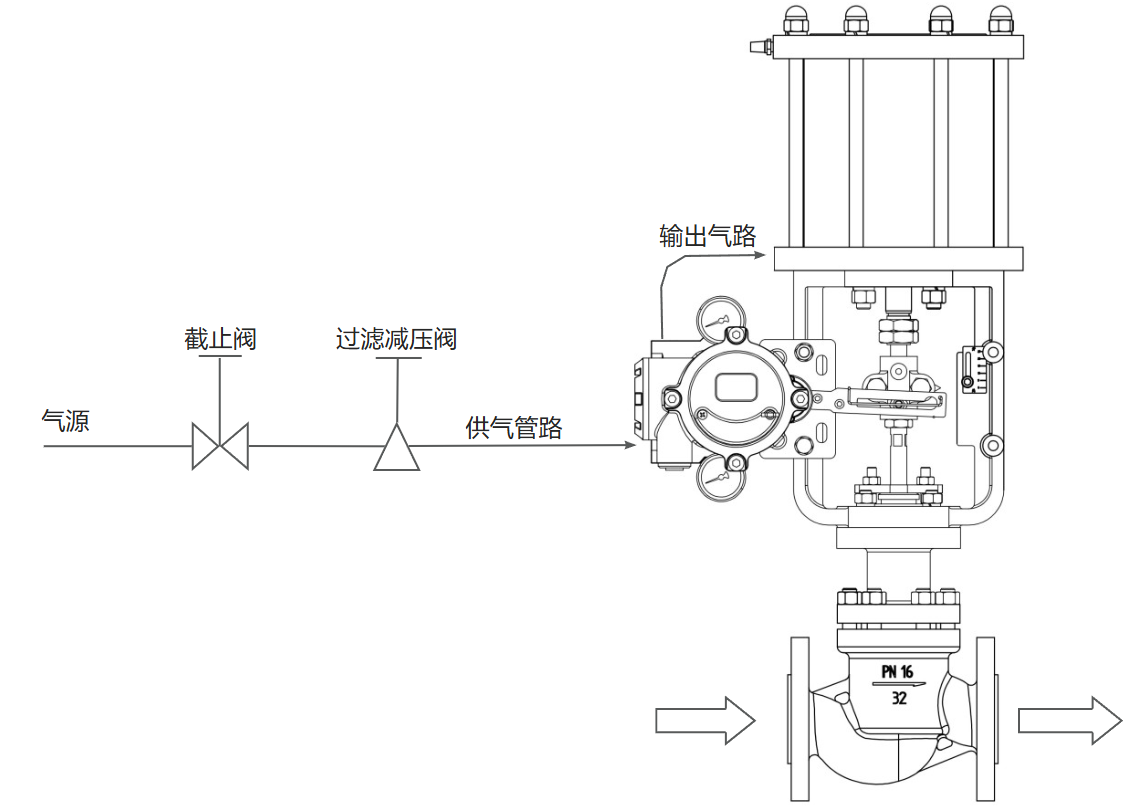
接管前吹扫管路,SUP 为气源输入口,OUT 为输出至执行机构;初次通气后检查接头泄漏,排气口保持畅通。
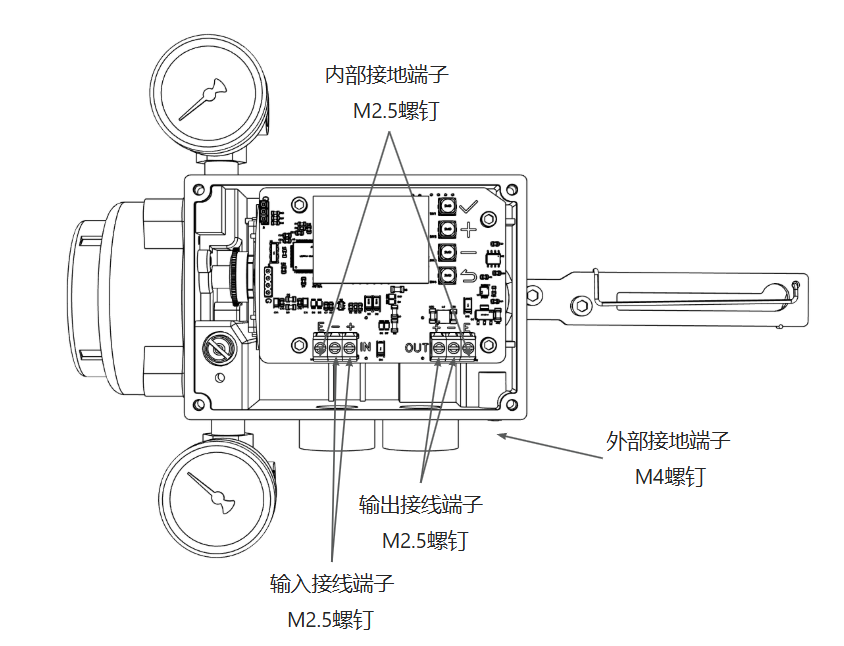
IN+ / IN- 接 4–20 mA 输入;OUT+ / OUT- 接阀位反馈输出;E 为接地端。IVPi 本安型输入和输出接线端子为 M2.5,外部接地端子为 M4;HART 信号叠加在输入回路上。
本安型经安全栅或隔离式安全栅接入;隔爆型确认电缆引入装置和堵头符合要求,危险场所接线前切断相关电源。
确认安装牢固、反馈机构正确、气路无泄漏、输入信号正确后,将输入信号置于 18 mA ±0.5 mA,长按 ↩ 启动自整定。
分别给定低端、中间点和满量程电流,检查阀门动作平稳、方向符合工艺要求、气密性正常,LCD 与 HART 状态无设备故障位。
Local Menu


| PV / SP | 运行显示,显示当前阀位和设定值,范围 0.0-100.0%。 |
|---|---|
| L-R | 行程模式,L 为直行程,R 为角行程。 |
| O-C | 阀门开关位置反转,用于安装方向与开关方向修正。 |
| FO | 完全打开使能,设定值接近 99% 时强制全开。 |
| P / I / D | PID 参数,用于调整响应速度、稳态偏差消除能力和动态抑制能力。 |
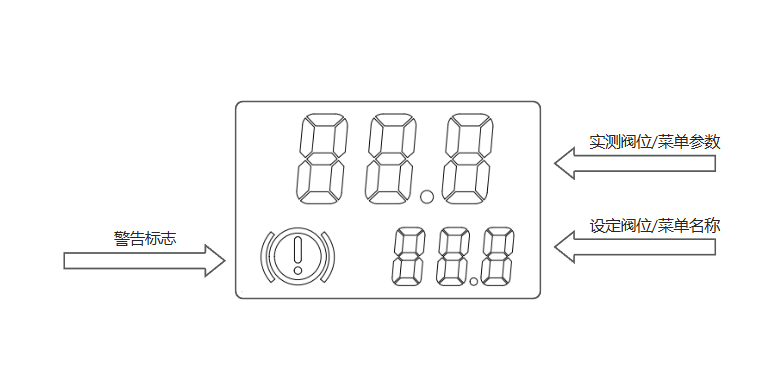
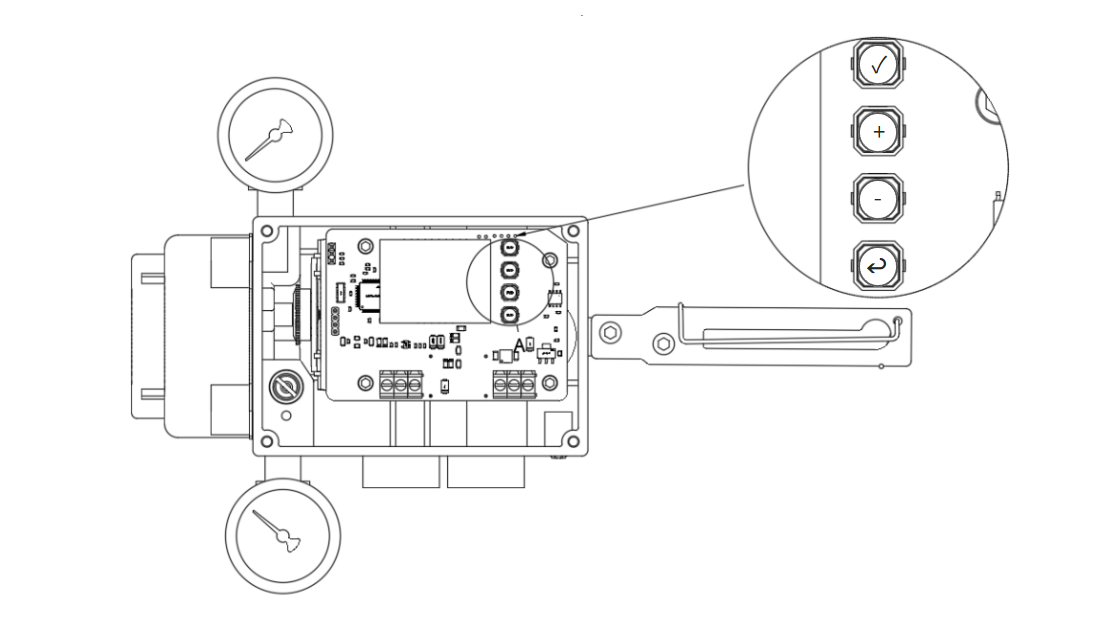
✓ 进入菜单。+ 或 - 选择菜单项。✓ 进入编辑状态,警告标志常亮。+ 或 - 修改参数。✓ 保存,或按 ↩ 放弃修改。输入信号为 18 mA ±0.5 mA 时,长按 ↩ 可启动自整定;自整定期间阀门会动作,现场操作前应确认工况安全。
Field Validation
为验证 IVP 在不同阀门结构、执行机构规格和现场气源条件下的适配能力,我们持续前往多家阀门厂开展实阀测试。测试覆盖直行程、角行程、大口径和高摩擦负载等工况,用同一套整定与阶跃实验方法记录响应数据。









下方为现场 C 的阶跃测试数据;曲线记录给定 SP 与阀位反馈 PV 随时间的变化,用于观察响应速度、稳定性和稳态偏差。
| 静态性能 | 基本误差、回差、阀位反馈精度 < ±1.0% F.S. |
|---|
Documents